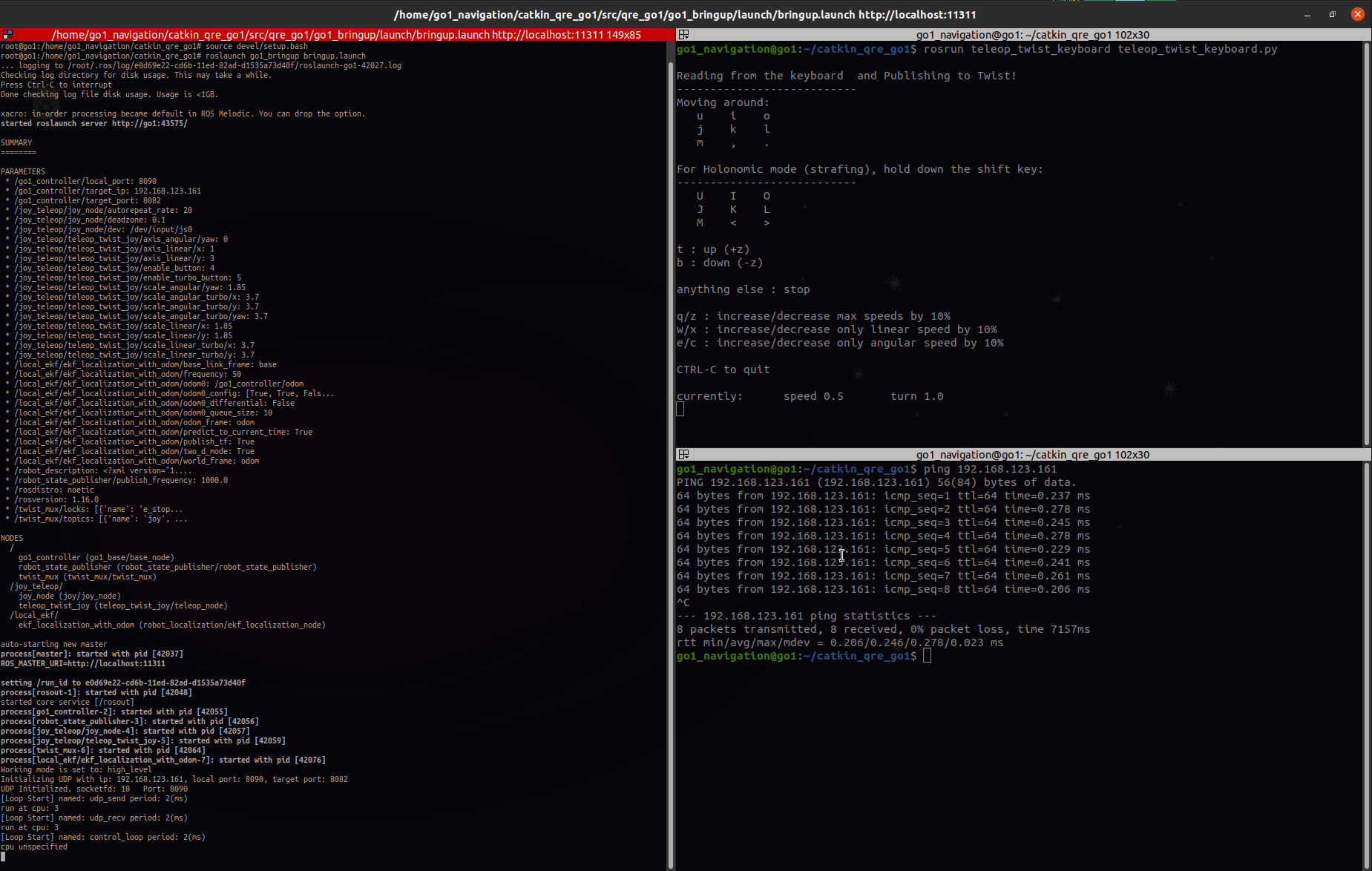
I am trying to control my Go1 robot using the repository qre_go1 but the robot doesn’t respond. I tried both the Quick-Start Teleop and Autonomous Navigation commands listed on quick_start but neither is working on the real robot.
From the repository the install files and basic setup don’t work out of the box. I managed to build the packages for both melodic and noetic versions by making some changes manually and both systems fail to communicate with the robot.
Also, I have tried using the latest v3.8.0 & v3.8.6 from Unitree’s repository unitree_legged_sdk/v3.8.0 and that doesn’t work with my Go1 robot. Instead, I was able to run basic examples from a forked repository made available online by Jonas Grube JonasFovea/unitree_legged_sdk . Using this repository I was able to confirm that the robot can be controlled from my PC, but to go to the next step for navigation I need to communicate with the robot and control its movement using path planning algorithms.
Can you point out what might be going wrong?
I am trying to control my Go1 robot using the repository qre_go1 but the robot doesn’t respond. I tried both the Quick-Start Teleop and Autonomous Navigation commands listed on quick_start but neither is working on the real robot.
Have you setup a static connection and can you ping the go1. If not please follow networks which has just been updated.
Yes, I can ssh into it. Connection works for both LAN and WiFi.
As mentioned above, I am able to compile examples from JonasFovea/unitree_legged_sdk/tree/fix, and execute ./example_walk with both LAN and WiFi. The robot responds and moves as expected. I am not seeing this same behavior from either Unitree’s or MBS’s repositories when I try to use the unitree_ros_to_real package.
I think so. I just switch on the Go1 robot, then it stands up automatically and then I execute commands in the terminal. I have tried with both LAN and WiFi.
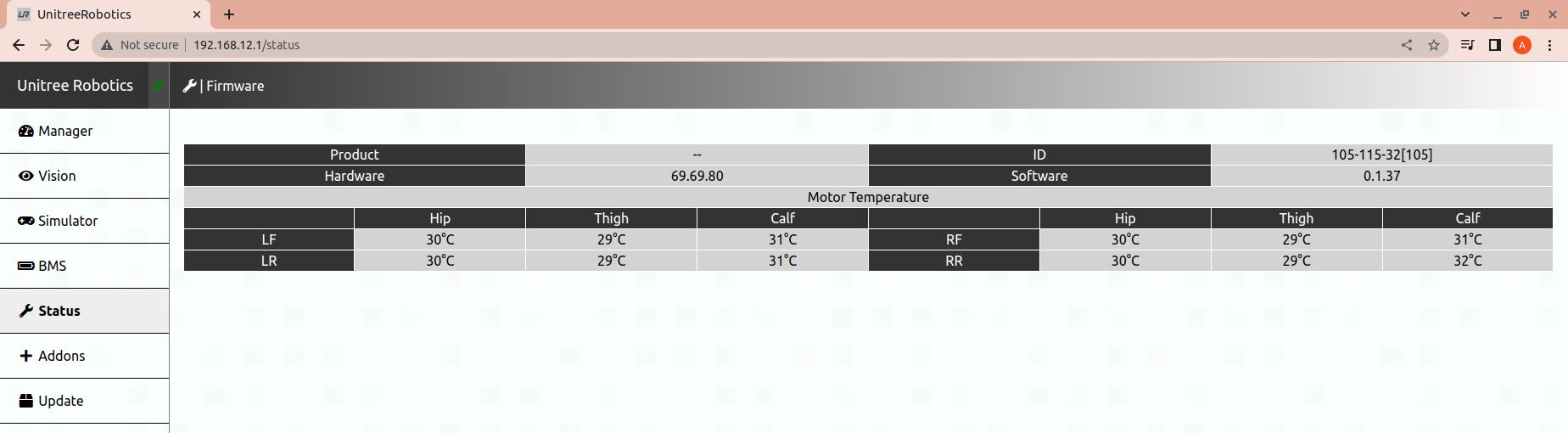
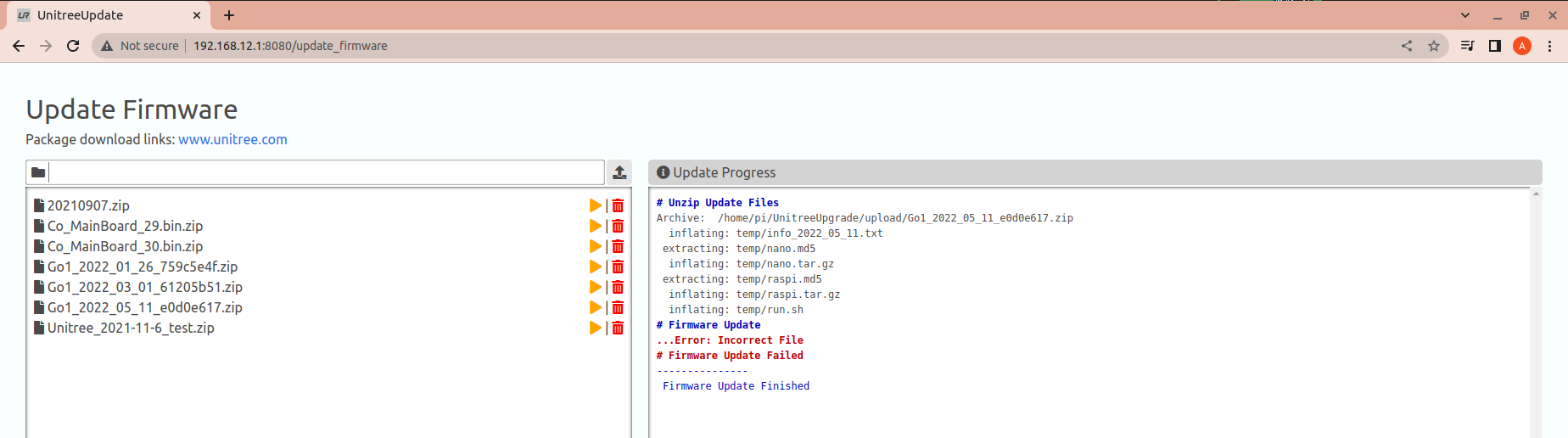
Please connect to the Wifi and provide the legged sports version as well as the firmware version. It might be a mismatch. The IP to check on browser is 192.168.12.1 with WiFi.