I have a Question regarding the turtlebot camera upgrade kit. It is based on an Orbbec Astra Sereo S camera. I tried almost everything to get a signal from the camera.
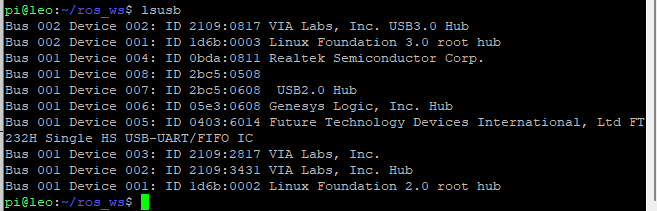
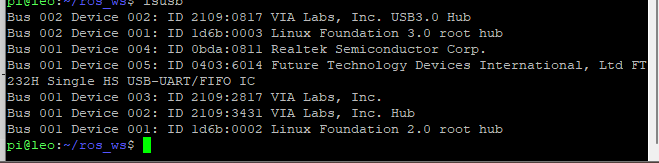
Using Win 11 I installed the Windows driver and the computer finds the camera in the device manager but the Orbbec Viewer doesn’t find it. Also under Linux the camera can’t be found. Same on the Raspberry Pi 4B platform under Linux and ROS Noetic (the main system where the camera should run). After a lot hours of software experiments I wonder if it could be the hardware but if yes why dose the camera appear in the device manager and show up a green lamp on the camera itself.