
My situation:
- Hardware Version 2.1 and Software Version 1.1
- I have set CAN ID is 0x02 by R-Link and Testing MIT mode via “Cubemars Upper computer” ( My power supply is 30V 10A.) It works fine.
I have AK80-64 and STM32F103 (bluepill) which have CAN controller on board and CAN Transceiver module.
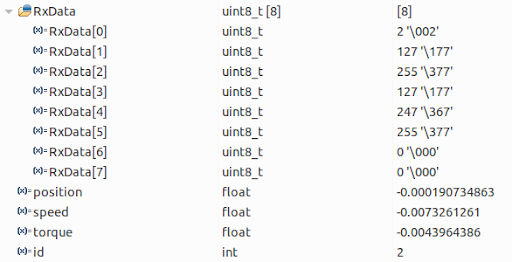
I can read the position, speed, and torque of the motor by CAN bus, like the figure below.
Issue:
I cannot control the MIT mode position or speed control. Even though I have followed the manual 1.0.9 version.
My Code:
float p_in = 0.0f;
float v_in = 0.0f;
float kp_in = 0.0f;
float kd_in = 0.0f;
float t_in = 0.0f;
/// limit data to be within bounds ///
float P_MIN = -12.5f;
float P_MAX = 12.5f;
float V_MIN = -8.0f;
float V_MAX = 8.0f;
float T_MIN = -144.0f;
float T_MAX = 144.0f;
float Kp_MIN = 0.0f;
float Kp_MAX = 500.0f;
float Kd_MIN = 0.0f;
float Kd_MAX = 5.0f;
unsigned int p_int;
unsigned int v_int;
unsigned int kp_int;
unsigned int kd_int;
unsigned int t_int;
float position;
float speed;
float torque;
//MIT mode
void pack_cmd(float p_des, float v_des, float kp, float kd, float t_ff)
{
p_in = fminf(fmaxf(P_MIN, p_des), P_MAX);
v_in = fminf(fmaxf(V_MIN, v_des), V_MAX);
kp_in = fminf(fmaxf(Kp_MIN, kp), Kp_MAX);
kd_in = fminf(fmaxf(Kd_MIN, kd), Kd_MAX);
t_in = fminf(fmaxf(T_MIN, t_ff), T_MAX);
/// convert floats to unsigned ints ///
p_int = float_to_uint(p_in, P_MIN, P_MAX, 16);
v_int = float_to_uint(v_in, V_MIN, V_MAX, 12);
kp_int = float_to_uint(kp_in, Kp_MIN, Kp_MAX, 12);
kd_int = float_to_uint(kd_in, Kd_MIN, Kd_MAX, 12);
t_int = float_to_uint(t_in, T_MIN, T_MAX, 12);
/// pack ints into the can buffer /// I set motor’s ID = 2
TxHeader.StdId = 0x02;
TxHeader.IDE = CAN_ID_STD;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.DLC = 8;
TxData[0] = p_int >> 8;
TxData[1] = p_int & 0xFF;
TxData[2] = v_int >> 4;
TxData[3] = ((v_int & 0xF) << 4) | (kp_int >> 8);
TxData[4] = kp_int & 0xFF;
TxData[5] = kd_int >> 4;
TxData[6] = ((kd_int & 0xF) << 4) | (kp_int >> 8);
TxData[7] = t_int & 0xff;
HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox);
HAL_Delay(2);
}
void Enable_motor()
{
//Enable Motor
TxHeader.StdId = 0x02; //Motor's ID
TxHeader.IDE = CAN_ID_STD;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.DLC = 8;
TxData[0] = 0XFF;
TxData[1] = 0xFF;
TxData[2] = 0xFF;
TxData[3] = 0xFF;
TxData[4] = 0xFF;
TxData[5] = 0xFF;
TxData[6] = 0xFF;
TxData[7] = 0xFC;
HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox);
HAL_Delay(2);
}
void Disable_motor()
{
//Enable Motor
TxHeader.StdId = 0x02; //Motor's ID
TxHeader.IDE = CAN_ID_STD;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.DLC = 8;
TxData[0] = 0XFF;
TxData[1] = 0xFF;
TxData[2] = 0xFF;
TxData[3] = 0xFF;
TxData[4] = 0xFF;
TxData[5] = 0xFF;
TxData[6] = 0xFF;
TxData[7] = 0xFD;
HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox);
HAL_Delay(2);
}
void SetZeroPos()
{
//Enable Motor
TxHeader.StdId = 0x02; //Motor's ID
TxHeader.IDE = CAN_ID_STD;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.DLC = 8;
TxData[0] = 0XFF;
TxData[1] = 0xFF;
TxData[2] = 0xFF;
TxData[3] = 0xFF;
TxData[4] = 0xFF;
TxData[5] = 0xFF;
TxData[6] = 0xFF;
TxData[7] = 0xFE;
HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox);
HAL_Delay(2);
}
int float_to_uint(float x, float x_min, float x_max, unsigned int bits)
{
float span = x_max - x_min;
if(x < x_min)
x = x_min;
else if(x > x_max)
x = x_max;
return (int) ((x- x_min)*((float)((1<<bits)/span)));
}
int main(void)
{
SetZeroPos();
Enable_motor();
While(1)
{
pack_cmd(1.57, 0.0, 1.0, 0.0, 0.0); //Set position 90 Degree Kp = 1.0
}
}