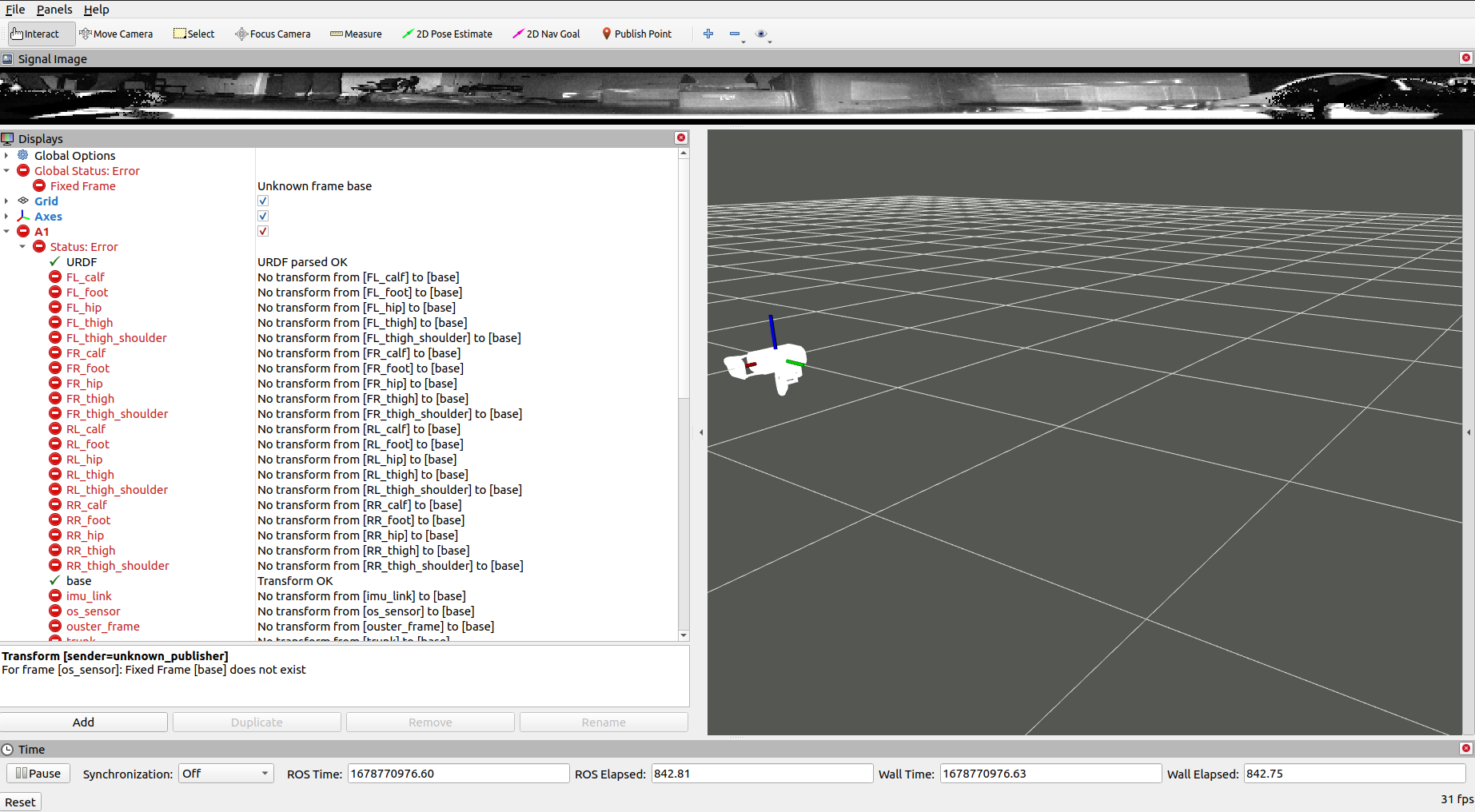
After executing a1_viz view.launch, in rviz i am getting errors in A1 and pointcloud2.
Mostly error in A1 like no transform from [FL_calf] to [base] …
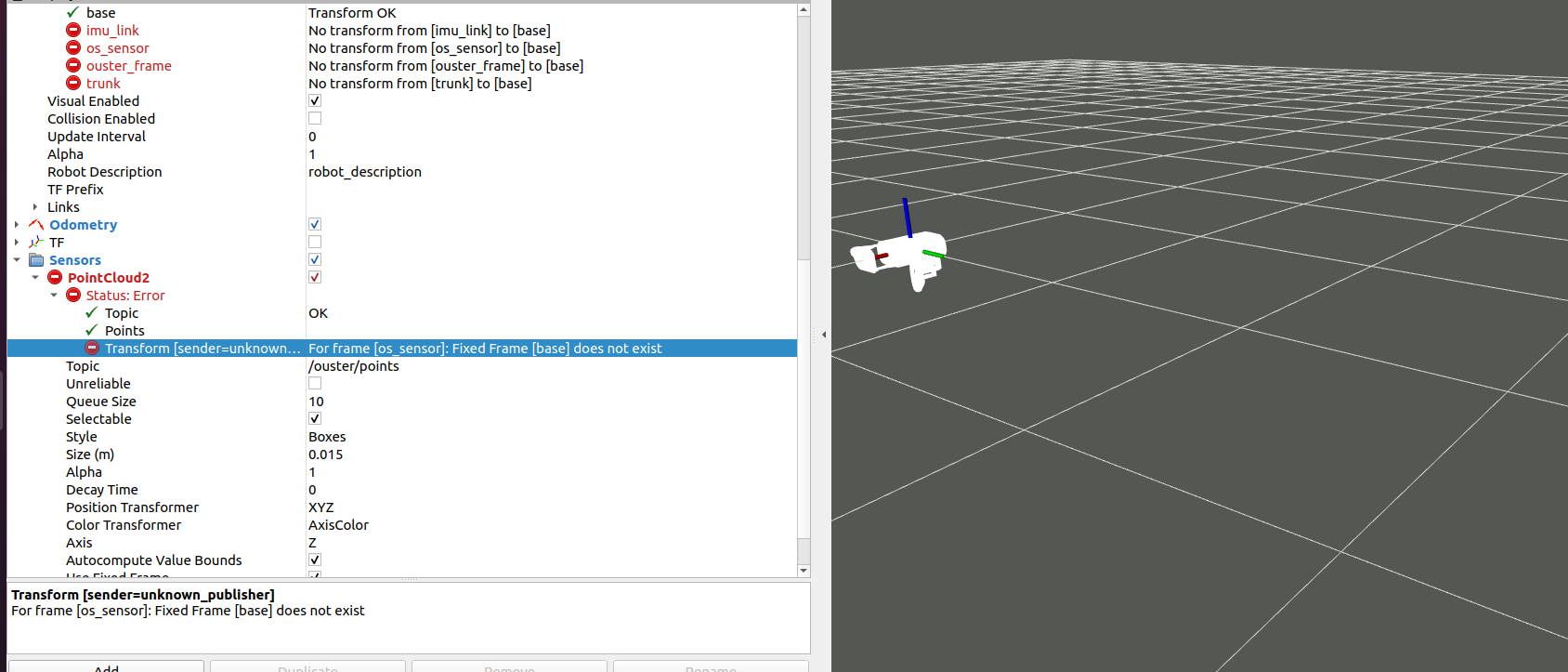
imu_link No transform from [imu_link] to [base]
ouster frame No transform from [ouster_frame] to [base]
PointCloud2 :
For frame [os_sensor]: Fixed frame [base] does not exist.
Which PC the Viz is on?
->Through PCc Ubuntu 20.04 [ROS noetic ] we are running Rviz.
Roscore is running on Local PC.
Is it via SSH?
NO. On Local PC with Ubuntu 20.04 Through ssh we are running high level node, a1_state_publisher, a1_ouster_launch.
roscore running on PC by setting multiple PC setup for ROS.
Which qre version you are using v3.3.1 or v3.2.0
The SDK version on board is unitree-legged-sdk 3.3.1 and same qre driver we downloaded and did catkin_make on local machine and ran the a1_viz view.launch command on the local machine.
@dhananjay currently, version 3.2.0 of our provides full body viewing, v3.3.1 has some bugs and is under development hence we ask you to use v3.2.0.
Additionally, if you are running some ros nodes on the robot and some ros nodes on your PC then you need to configure your PC for ros multi machine
Alternatively, you can run all the launch files from your local PC and including the hardware drivers and state publishers. You should be able to view and control the robot. For the ouster you would have to change the launch file with the export IP.
A final alternative is to run all the launch files in the A1’s nvidia board via ssh -X. However, with this method the FPS would be less ~1 for which you can either use a high quality high speed ethernet cable or a 5G router.
@Sohail Now we are able to see details in Ruiz without any error. Can you please help me to launch SLAM package in A1 mapper.
In document we are not able to find commands. Actual commands on A1 mapper and in documents are different