
The both services are green and these both buttons are green correct?
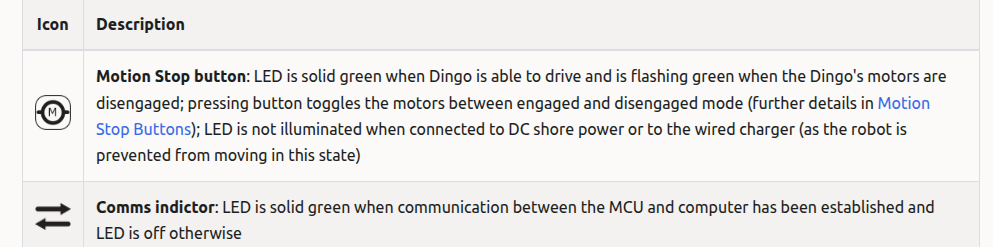
yes, both M and <> button are green
Dingo 4 lights are red though, have you changed anything in the /etc/clearpath/robot.yaml ? Are any of them flashing?
The yaml is quite minimalistic, see below, I do think we needed to add the “logitech” line since the default installation is referring to ps4.
serial_number: dd100-0030
version: 0
system:
hosts:
- hostname: cpr-dd100-0030
ip: 192.168.131.1
ros2:
namespace: dd100_0030
platform:
controller: logitech
and LED lights are red, not flashing, that is as soon as I restart the clearpath-platform service
Please try
sudo service clearpath-robot restart
Then publish is the emeregency stop topic false as well and check the mod button. Also paste the result of
sudo journalctl -u clearpath-platform > clearpath_platform.log
the emergency topic remains false, buttons are green,
I’m trying to upload the output of the journal, but it is exceeding the 4M upload limit. no option to upload zip, gzip, … ?
Just paste the final50 lines of output
I renamed my gzip as a .txt, so you’d have the remove the txt extension to unzip (…)
clearpath_platform.txt.gz.txt (263.4 KB)
50 lines :
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.838103] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x5B016426, datawriter_id: 0x002(5), publisher_id: 0x002(3)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.839778] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x003(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.841780] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x5B016426, publisher_id: 0x003(3), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.845572] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x5B016426, datawriter_id: 0x003(5), publisher_id: 0x003(3)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.847597] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x004(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.850146] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x5B016426, publisher_id: 0x004(3), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.854866] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x5B016426, datawriter_id: 0x004(5), publisher_id: 0x004(3)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.856359] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x005(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.857193] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x5B016426, publisher_id: 0x005(3), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.859729] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x5B016426, datawriter_id: 0x005(5), publisher_id: 0x005(3)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.860582] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x006(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.861203] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x5B016426, publisher_id: 0x006(3), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.862156] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x5B016426, datawriter_id: 0x006(5), publisher_id: 0x006(3)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.863320] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x007(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.863854] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x5B016426, publisher_id: 0x007(3), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.870108] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x5B016426, datawriter_id: 0x007(5), publisher_id: 0x007(3)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.871171] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x008(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.871821] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x5B016426, subscriber_id: 0x000(4), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.887939] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x5B016426, datareader_id: 0x000(6), subscriber_id: 0x000(4)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.889001] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x009(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.889826] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x5B016426, subscriber_id: 0x001(4), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.897399] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x5B016426, datareader_id: 0x001(6), subscriber_id: 0x001(4)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.898486] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x00A(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.899413] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x5B016426, subscriber_id: 0x002(4), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.900839] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x5B016426, datareader_id: 0x002(6), subscriber_id: 0x002(4)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.902232] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x00B(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.903390] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x5B016426, subscriber_id: 0x003(4), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.904342] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x5B016426, datareader_id: 0x003(6), subscriber_id: 0x003(4)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.905290] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x5B016426, topic_id: 0x00C(2), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.905823] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x5B016426, subscriber_id: 0x004(4), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.907033] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x5B016426, datareader_id: 0x004(6), subscriber_id: 0x004(4)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [micro_ros_agent-18] [1760968494.918505] info | ProxyClient.cpp | create_replier | replier created | client_key: 0x5B016426, requester_id: 0x000(7), participant_id: 0x000(1)
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [imu_filter_madgwick_node-17] [INFO] [1760968494.940402596] [dd100_0030.imu_filter_madgwick]: First pair of IMU and magnetometer messages received.
Oct 20 13:54:54 cpr-dd100-0030 clearpath-platform-start[2193]: [imu_filter_madgwick_node-17] [WARN] [1760968494.963343616] : Messages of type 0 arrived out of order (will print only once)
Oct 20 13:54:55 cpr-dd100-0030 clearpath-platform-start[2193]: [spawner-3] [INFO] [1760968495.193835287] [dd100_0030.spawner_joint_state_broadcaster]: waiting for service /dd100_0030/controller_manager/list_controllers to become available…
Oct 20 13:54:55 cpr-dd100-0030 clearpath-platform-start[2193]: [lighting_node-19] [INFO] [1760968495.636600578] [dd100_0030.lighting_node]: User command timeout
Oct 20 13:54:55 cpr-dd100-0030 clearpath-platform-start[2193]: [ros2_control_node-2] [INFO] [1760968495.734250477] [dd100_0030.controller_manager]: Loading controller ‘joint_state_broadcaster’
Oct 20 13:54:55 cpr-dd100-0030 clearpath-platform-start[2193]: [spawner-3] [INFO] [1760968495.982542928] [dd100_0030.spawner_joint_state_broadcaster]: Loaded joint_state_broadcaster
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [ros2_control_node-2] [INFO] [1760968496.121479111] [dd100_0030.controller_manager]: Configuring controller ‘joint_state_broadcaster’
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [ros2_control_node-2] [INFO] [1760968496.121632053] [dd100_0030.joint_state_broadcaster]: ‘joints’ or ‘interfaces’ parameter is empty. All available state interfaces will be published
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [ros2_control_node-2] [INFO] [1760968496.271152955] [dd100_0030.controller_manager]: Loading controller ‘platform_velocity_controller’
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [spawner-3] [INFO] [1760968496.272022917] [dd100_0030.spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [spawner-4] [INFO] [1760968496.397254372] [dd100_0030.spawner_platform_velocity_controller]: Loaded platform_velocity_controller
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [ros2_control_node-2] [INFO] [1760968496.401548074] [dd100_0030.controller_manager]: Configuring controller ‘platform_velocity_controller’
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [spawner-4] [INFO] [1760968496.472046675] [dd100_0030.spawner_platform_velocity_controller]: Configured and activated platform_velocity_controller
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [INFO] [spawner-3]: process has finished cleanly [pid 2219]
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [INFO] [spawner-4]: process has finished cleanly [pid 2221]
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [aggregator_node-10] [INFO] [1760968496.662858025] [GenericAnalyzer]: Analyzer ‘Firmware’ matches ‘clearpath_diagnostics_updater: Firmware Version’.
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [aggregator_node-10] [INFO] [1760968496.662888547] [AnalyzerGroup]: Group ‘/Clearpath Diagnostics/Platform’ has a match with my analyzer ‘Firmware’.
Oct 20 13:54:56 cpr-dd100-0030 clearpath-platform-start[2193]: [aggregator_node-10] [INFO] [1760968496.662895155] [AnalyzerGroup]: Group ‘Clearpath Diagnostics’ has a match with my analyzer ‘/Clearpath Diagnostics/Platform’.
IF you are available we can set up a quick meeting. Please install anydesk and email support@mybotshop.de with a google meeting link or which everone you prefer.
Otherwise its abit late we can have the meeting tomorrow.
I will try to set up this anydesk in the mean time, it may take a bit
@Sohail I’ve sent you a mail on support@mybotshop.
In the mean time we found that the output of “ros2 topic echo /dd100_0030/platform/mcu/status/stop” shows a stop_power_status of true.
header:
stamp:
sec: 1761050450
nanosec: 55000000
frame_id: base_link
stop_power_status: true
external_stop_present: false
needs_reset: false
asking chatgpt or gemini refers to calling ros services that do not exist (yet?)
They refer to Clearpath-specific (private) Dingo-D platform installation software, including:
platform_estop_managernode- The
/estop/resetservice - The robot’s URDF/XACRO and launch configuration
does that sound familiar?
Try publishing true to that topic? Also we may have to postpone the meeting due to an urgent issue. For now please try contacting clearpath support
They added the e-stop always active in the Jazzy branch and usually with the button it can be reset as well as a topic/service which i cannot remember. Clearpath can probably inform on how to manage this.
Just to confirm you dingo is now is ROS2 Jazzy and you have flashed the firmware of the Dingo with Clearpath ROS2 Jazzy Firmware.
To avoid confusion:
-
Our dingo robot PC was pre-installed with U24/Jazzy, the Orin AGX was pre-installed with U22/Humble, but those two do not speak with one another, the messages are not compatible.
-
Since there is no official release for Jazzy on the Orin (yet), (and we happen to have a client using Humble), we re-installed the PC with U22/Humble and flashed the firmware with Clearpath Humble Firmware, NOT Jazzy. This way we want to make sure the robot PC (under Humble) can communicate with the Orin (as is). The documentation suggested above in the communication was humble btw.